


















Scene 1
Products
Scale RapidThe fastest way to production-quality labels.
Scale StudioLabeling infrastructure for your workforce.
Scale 3D Sensor FusionAdvanced annotations for LiDAR + RADAR data.
Scale ImageComprehensive annotations for images.
Scale VideoScalable annotations for video data.
Scale TextSophisticated annotations for text-based data.
Scale AudioAudio Annotation and Speech Annotation for NLP.
Scale MappingThe flexible solution to develop your own maps.
Scale NucleusThe mission control for your data
Scale ValidateCompare and understand your models
Scale LaunchShip and track your models in production
Scale Document AITemplate-free ML document processing
Scale Content UnderstandingManage content for better user experiences
Scale SyntheticGenerate synthetic data
Solutions
Resources
Company
nuScenes by Aptiv
Large-scale open source dataset for autonomous driving.
- Scene 1
- Scene 2
- Scene 3
- Scene 4
- Scene 5
- Scene 6
- Scene 7
- Scene 8
- Scene 9
- Scene 10
- Scene 11
- Scene 12
- Scene 13
- Scene 14
- Scene 15
- Scene 16
- Scene 17
- Scene 18
- Scene 19
- Scene 20
- Scene 21
- Scene 22
- Scene 23
- Scene 24
- Scene 25
- Scene 26
- Scene 27
- Scene 28
- Scene 29
- Scene 30
- Scene 31
- Scene 32
- Scene 33
- Scene 34
- Scene 35
- Scene 36
- Scene 37
- Scene 38
- Scene 39
- Scene 40
- Scene 41
- Scene 42
- Scene 43
- Scene 44
- Scene 45
- Scene 46
- Scene 47
- Scene 48
- Scene 49
- Scene 50
Overview
Support for computer vision and autonomous driving research
nuScenes is an initiative intended to support research to further advance the mobility industry.
With this goal in mind, the dataset includes 1000 scenes collected in Boston and Singapore and is the largest multi-sensor dataset for autonomous vehicles.
It features:
Full sensor suite: 1x LiDAR, 5x RADAR, 6x camera, IMU, GPS
1000 scenes of 20s each
1,440,000 camera images
400,000 LiDAR sweepsl
Two diverse cities: Boston and Singapore
Left versus right hand traffic


Data Collection
Careful scene planning by Aptiv
For the dataset, Aptiv managed the collection of data, carefully choosing to capture challenging scenarios and a diversity of locations, times and weather conditions.
Collected in Boston's Seaport and Singapore's One North, Queenstown and Holland Village districts, each of the 1000 scenes in the dataset were manually selected.
Car Setup
Vehicle, Sensor and Camera Details
Two identical cars with identical sensor layouts were used to drive in Boston and Singapore.
Refer to the image below for the placement of the sensors:
- 6
- 12Hz capture frequency
- 1/1.8'' CMOS sensor of 1600x1200 resolution
- Bayer8 format for 1 byte per pixel encoding
- 1600x900 ROI is cropped from the original resolution to reduce processing and transmission bandwidth
- Auto exposure with exposure time limited to the maximum of 20 ms
- Images are unpacked to BGR format and compressed to JPEG
- See camera orientation and overlap in the figure below.
Cameras - 1
- 20Hz capture frequency
- 32 channels
- 360° Horizontal FOV, +10° to -30° Vertical FOV
- 80m-100m Range, Usable returns up to 70 meters, ± 2 cm accuracy
- Up to ~1.39 Million Points per Second
Spinning LiDAR - 5
- 77GHz
- 13Hz capture frequency
- Independently measures distance and velocity in one cycle using Frequency Modulated Continuous Wave
- Up to 250m distance
- Velocity accuracy of ±0.1 km/h
Long Range RADAR Sensor
Flythrough of the Nuscenes Teaser
Sensor Calibration
Data alignment between sensors and cameras
To achieve a high quality multi-sensor dataset, it is essential to calibrate the extrinsics and intrinsics of every sensor.
We express extrinsic coordinates relative to the ego frame, i.e. the midpoint of the rear vehicle axle.
The most relevant steps are described below:
LiDAR extrinsics
Camera extrinsics
Camera intrinsic calibration
IMU extrinsics

Sensor Synchronization
In order to achieve cross-modality data alignment between the LiDAR and the cameras, the exposure on each camera was triggered when the top LiDAR sweeps across the center of the camera’s FOV. This method was selected as it generally yields good data alignment. Note that the cameras run at 12Hz while the LiDAR runs at 20Hz.
The 12 camera exposures are spread as evenly as possible across the 20 LiDAR scans, so not all LiDAR scans have a correspondingcamera frame.
Reducing the frame rate of the cameras to 12Hz helps to reduce the compute, bandwidth and storage requirement of the perception system.
Data Annotation
Complex Label Taxonomy
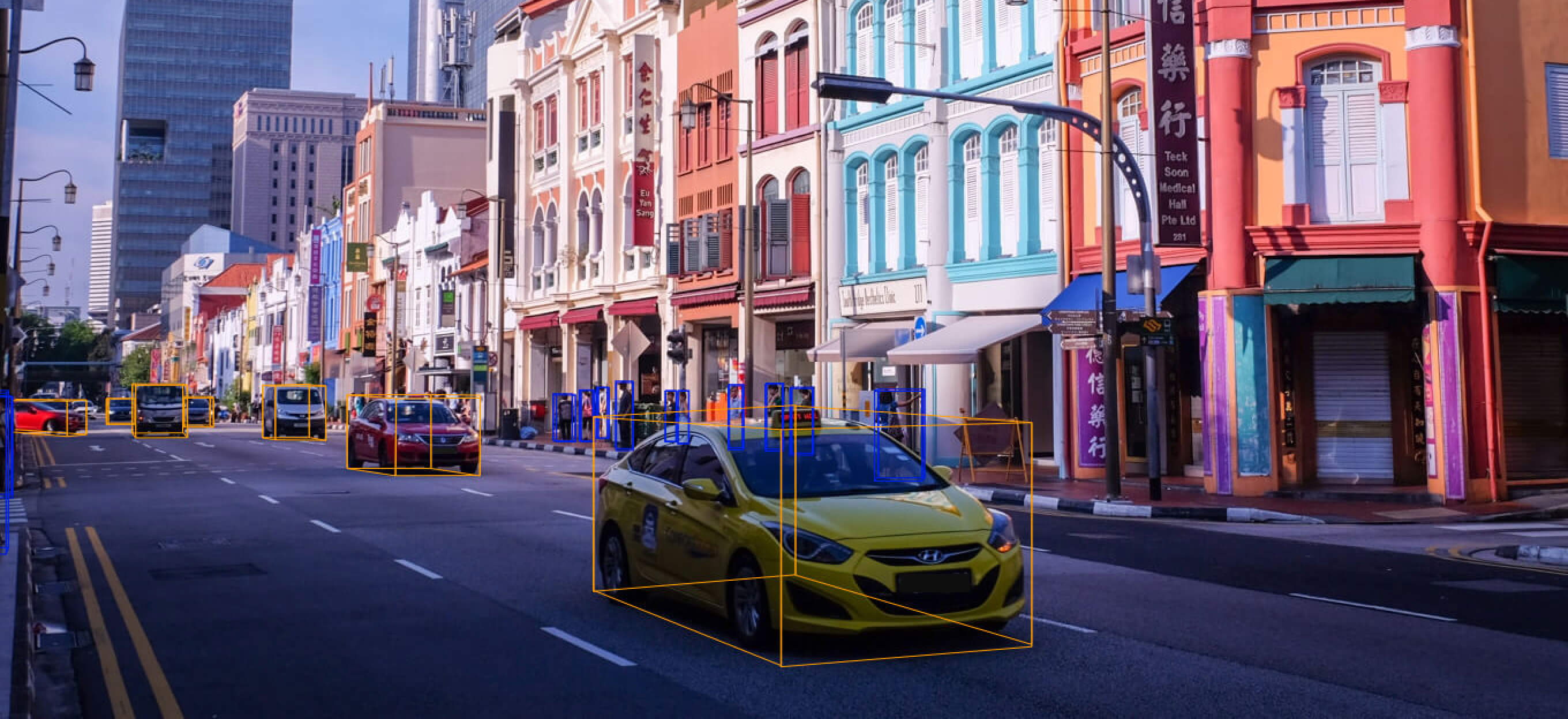
As Aptiv's partner in developing nuScenes, Scale contributed two things: First, is the data annotation, including deciding on the taxonomy and developing instructions for labelers and managing QA.
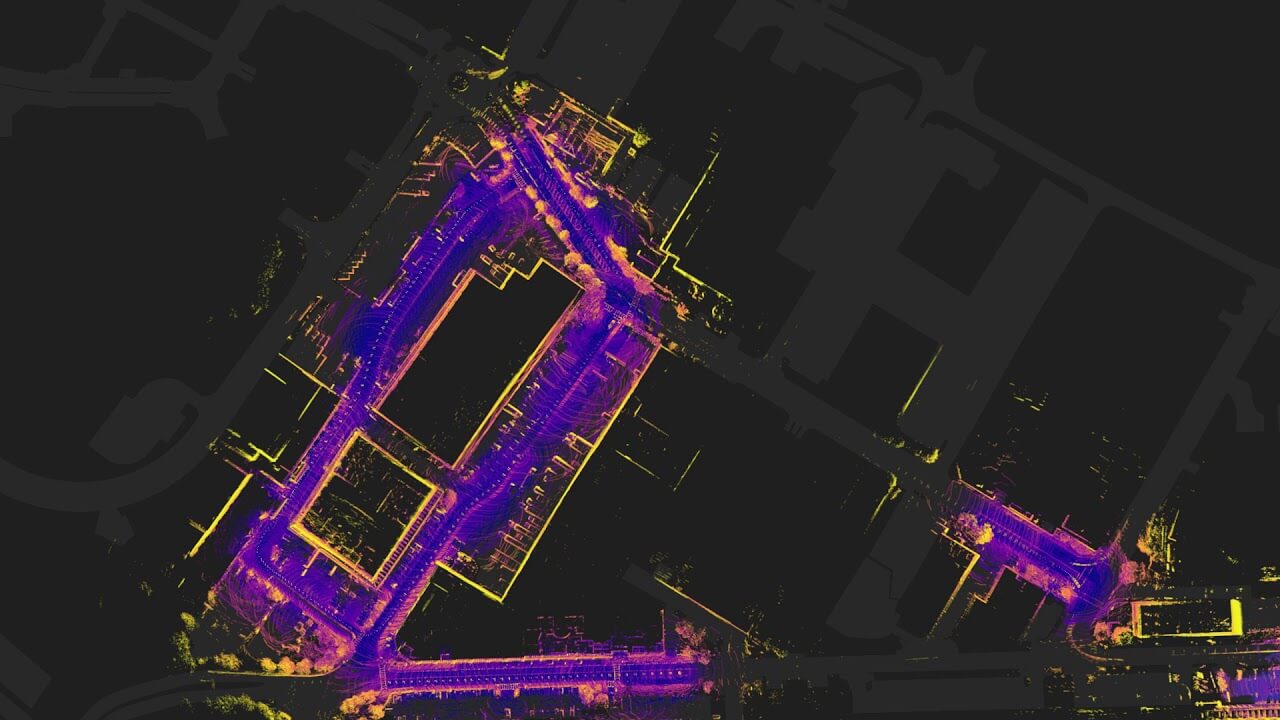
Second is Scale's web-based visualizer for LiDAR and camera data for exploring the dataset. Scale's visualizer allows point cloud data to be easily embedded into any webpage and shared.
Instances Per Label
493,322
vehicle.car
208,240
human.pedestrian.adult
152,087
movable_object.barrier
208,240
movable_object.trafficcone
88,519
vehicle.truck
24,860
vehicle.trailer
14,671
vehicle.construction
14,501
vehicle.bus.rigid
Get Started with Nuscenes
Ready to get started with nuScenes?
This tutorial will give you an overview of the dataset without the need to download it.
Please note that this page is a rendered version of a Jupyter Notebook.
Take the Tutorial